




Z-Arm 2442 Collaborative Robotic Arm

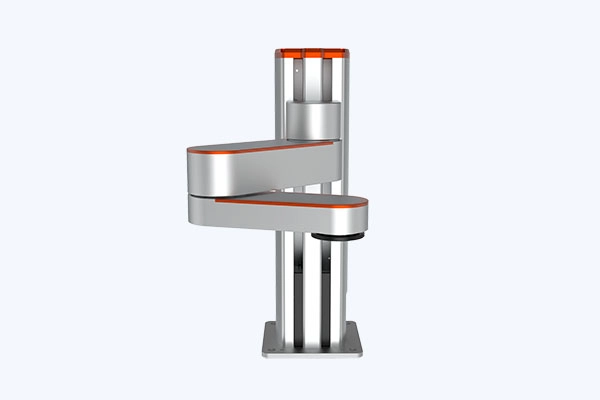

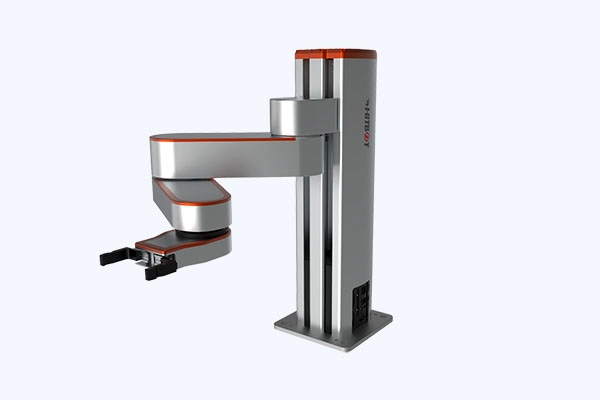
The Hitbot Z-Arm 2442 is designed by Huiling Tech, it is lightweight collaborative robot, easy to program and use, support SDK. In addition, it is collision detection supported, namely, it would be automatic to stop when touching human, which is smart human-machine collaboration, the security is high.


Product Parameters:
| Product Name: | Robotic Arm | |
| Item No.: | Z-Arm 2442 | |
| J1 Axis | Arm Reach | 220mm |
| Rotatoin Range | ±90° | |
| J2 Axis | Reach | 200mm |
| Rotation Range | ±164° | |
| Z Axis | Reach | 240mm |
| R Axis(Optional) | Rotation Range | ±1080° |
| Maximum Average Linear Velocity | 1255.45mm/s(with 1.5kg payload)/1023.79mm/s(with 2kg payload) | |
| Repeatability | ±0.03mm | |
| Rated Payload | 2KG | |
| Max Payload | 3KG | |
| Number of axis | 4 | |
| Voltage | 220V/110V 50-60Hz DC24V / Power 500W | |
| Communication | Ethernet | |
| Extensibility | Built-in motion controller; with 24 I/O ports; extensibility for adding one more arm | |
| Customizable Z-axis height | 0.1-1 meter | |
| Z-axis Drag to teach | Ok | |
| Supportable HITBOT Grippers | Z-EFG-8S / Z-EFG-12 / Z-EFG-20 / Z-EFG-20S / Z-EFG-30 / Z-EFG-50,第五轴,3D打印 | |
| J2 arm travel range | Standard: ±164° | |
| Optional: 15-345° | ||
| Optional Accessories | Grippers/5-th axis/485 board /3D printing kit | |
| Working Temperature | Temperature: 0-55℃, Humidity: RH85 | |
| I/O Ports: Digital Input (Isolated) | 9+3 arm extensibility | |
| I/O Ports: Digital Output (Isolated) | 9+3 extensibility for one more arm | |
| Height | 596mm | |
| Weight | 19Kg | |
| Machine Base Size: Footprint | 200*200*10mm | |
| Machine Base Size: Machine fixing holes spacing | 160mm*160mm (with 4M 8*20 screws) | |
| Collision Detection | Yes | |
| Flange Compatibility | Compatible with Z-Arm 2140 | |
Product Description:

























